














 124-125 / 568
124-125 / 568

דור לוינברג
: מנחה
' מר ג
וש אלטמן
הנדסה מכנית
החדרה אוטונומית של מחט תוך גרמית
מטרת הפרויקט
הינה תכנון מערכת אוטונומית אשר תוכל לזהות את נק
'
החדרת המחט בתהליך של
החדרת מחט תוך גרמית
.
זאת כדי לייעל ולבצע את הפעולה באחוזי הצלחה גבוהים ועל מנת לאפשר
המשך טיפול רפואי מתאים
.
, כיום
הרופא מוצא את נק
'
ההחדרה באופן ידני בעזרת אצבעותיו ומישוש באזור ידוע מראש
,
הרופא
מוודא שאין בליטות
(
אזור בו העצם אמורה להיות שטוחה
.)
במידה והחליט כי אין בליטות עובר לשלב
החדרת המחט
.
האתגר ההנדסי
בפרויקט היה למצוא את הטכנולוגיה היישומית ותכנון המערכת שתדמה את פעולת
, הרופא
כלומר שתבצע תנועה במרחב וסריקות נגד בליטות זעירות בעצם בצורה אוטונומית
.
החלופה
הנבחרת הינה שילוב של שני תחומים
:
מכניקה ואלקטרוניקה
.
תחום המכניקה
:
שני מנגנונים שמטרתם לפרק ולהרכיב תתי הרכבות בצורה חכמה
.
.1
כחלק מהדרישות מתאם הרגל הינו חלק שבא במגע עם הפצוע ולכן נעשה בו שימוש חד פעמי
,
המנגנון הבא מאפשר פירוק והרכבה של החלק באופן מהיר
:
.2
המנגנון הבא מאפשר לפרק באופן מהיר את החלק העליון
(
עם כל הרכיבים האלקטרונים
)
משאר
המערכת ולפנות מקום למערכת החדרת המחט תוך גרמית
:
תחום האלקטרוניקה
:
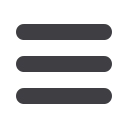
הצגת האלגוריתם ומכונת המצבים
:
הפרויקט
עוסק
בתחום
זיהוי של
'נק
החדרת
. גרמית תוך מחט
הצורך
בביצוע
זה תהליך
נובע
ממציאת
חלופה
לטיפול
וורידי תוך
שלעיתים
עלול
להיות
אתגר
. משמעותי
כיום
הפעולה
מבוצעת
י"ע
הרופא
באופן
, ידני
המערכת
שפותחה
מאפשרת
לבצע
את
התהליך
בצורה
אוטונומית
ואמינה
.
, בנוסף
משאירה
ידי את
הרופא
זמינות
לפעולות
נוספות
.
מצב פתוח
מנגנון נעילה
מצב נעול
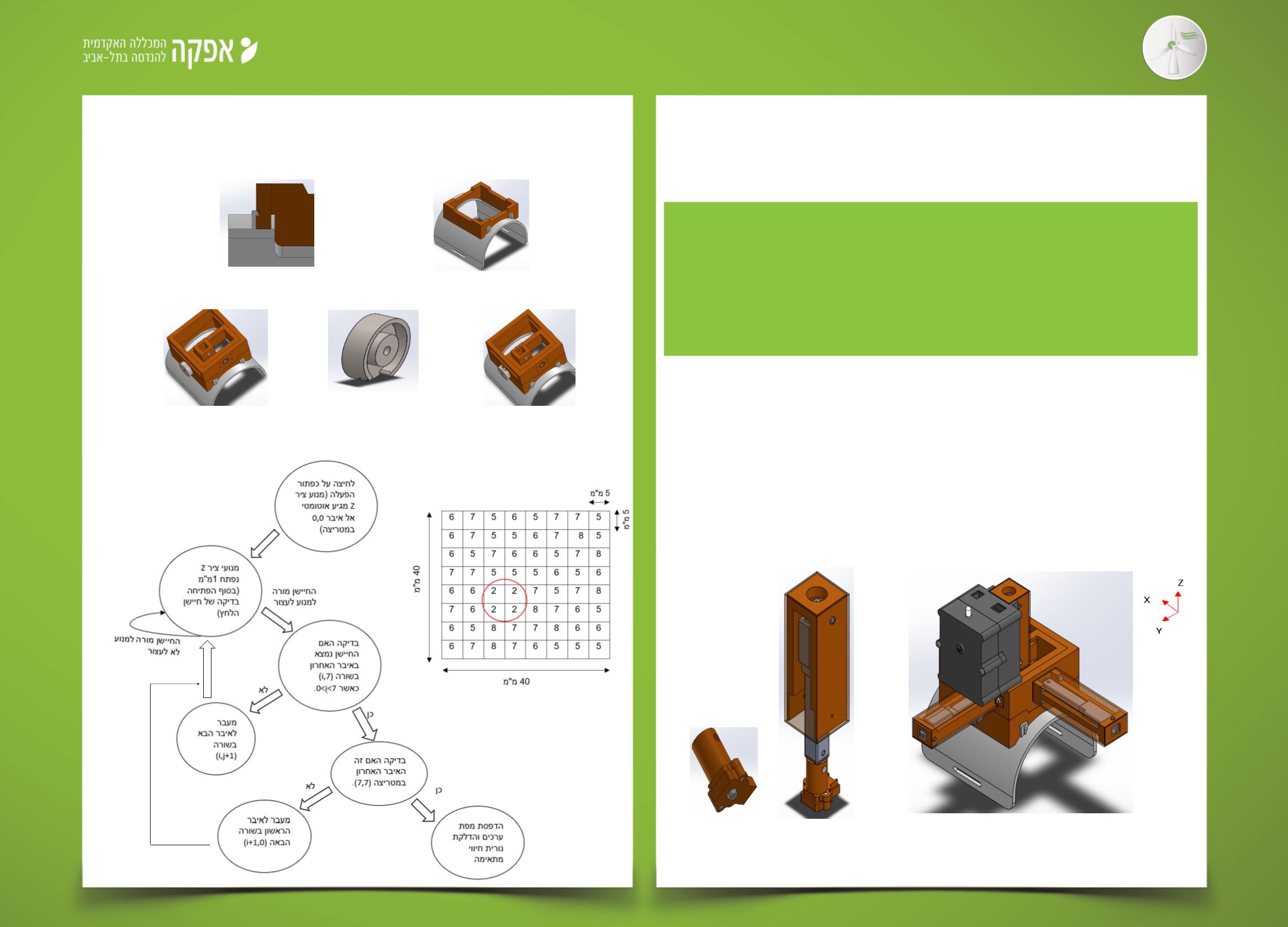
המערכת בשלמותה
דוגמא למפת ערכים סופית
הרכבת חיישן הלחץ