














 132-133 / 568
132-133 / 568

שרון מרדכי ודניאל ביטון
"ד: מנחה
ר ולדימיר אורליק
: לקוח
גיא יצחקי
,
גלאור תעשיות מזון בע
.מ"
הנדסה מכנית
'צ
ופילר
–
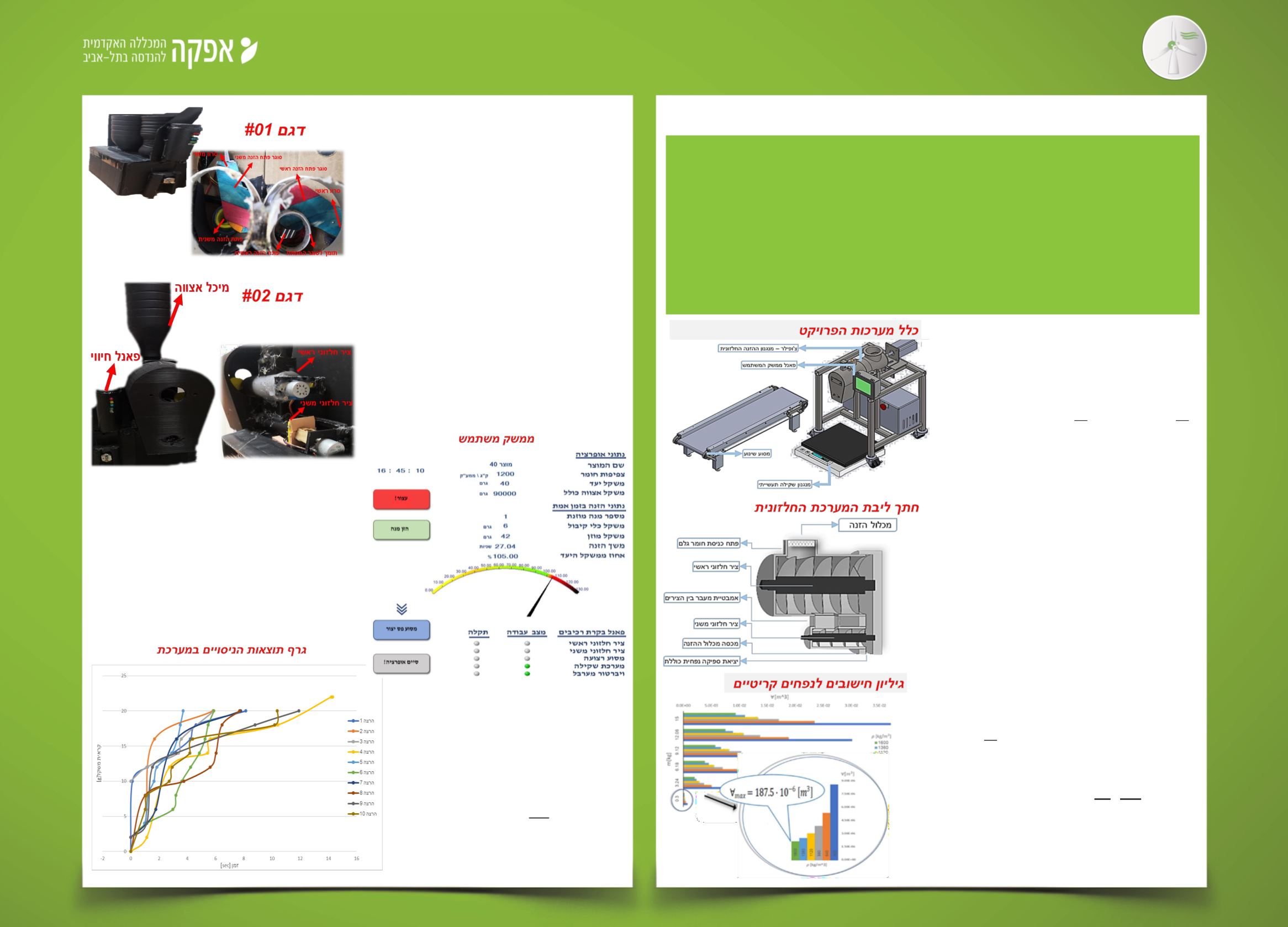
מערכת לחלוקת תערובות אבקתיות
המערכת במבט כללי
'צ
ופילר נועד לייעול תהליך הייצור
,
עבור לקוח קצה
.
עבורו תוכננה המערכת לטווח המשקלים
.
[ ]
< <
[ ]
עבור חומרים בטווח הצפיפויות
[ ]
< < ,
[ ]
למערכת תוכנן מסוע מודולרי לשינוע התוצר
הממוין לשלב האריזה בפס היצור
.
תהליך עבודת המערכת
•
קבלת נתונים בממשק המשתמש ע
"
י המפעיל
.
•
קבלת אצוות חומר גלם ממערבל התערובות
.
•
הוראת הפעלה
,
לכיול ובדיקת מנגנונים
.
•
הזנה חלזונית רציפה המחולקת לשתיים
•
הזנה ראשית
"ע:
י שני הצירים לקבלת
•
הזנה משנית
"ע:
י הציר המשני בלבד
•
העברת התוצר למסוע השינוע והוראת הפעלה
.
•
הזנת כלי קיבול חדש בפתח יציאת ההזנה
.
•
שמירת נתוני אופרציות למסד נתונים וניתוח ביצועים
הזנה חלזונית
תכנון הצירים החלזוניים התבסס על חישוב נפחים קריטיים
לטווח צפיפויות החומרים
.
עבור מקדם מילוי של
%
התקבל נפח הפסיעה הנדרש
∀
-על .
פיו חושבו
מאפייני הצירים החלזוניים ביחס של
1:100
"ע
מ לקיים ספיקה מקסימלית נדרשת
= .
[ ]
ואת היכולת להזנת ספיקה שואפת ל
-0
עבור דיוק נדרש
.
ההזנה נעשתה באמצעות מנועי צעד
"ע,
פ הקשר הבא
:
= ∀
,
∙
∙ [ ]
ספיקה מסית המתקבלת לפסיעה עבור ציר חלזוני
∀
,
נפח פסיעה של ציר
לאחר קיזוז מקדם המילוי
"סל
ד ציר חלזוני
צפיפות החומר באצוות חומר הגלם המוזן
תוצרי הפרויקט
•
ספר פרויקט המפרט את תהליך העבודה
•
קובץ נספחים להעמקת תיאוריה ומפרטים טכניים
•
תיק שרטוטים להצגת התכן המכני
•
אלגוריתם בקרה לשליטה במכלולי המערכת
•
תכנה לממשק משתמש ואינטגרציה מערכתית
•
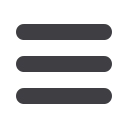
מימוש
2
דגמי אב
-
טיפוס סופיים מודפסים ב
3
דגם
01#
מבוסס על מנועי סרוו שפותחים וסוגרים את פתחי
" ההזנה ע
פ אלגוריתם
PID
של בקר המערכת
.
מכיל חיווי ויזואלי לתקלות ופעולות המערכת
.
דגם
02#
דגם שהורכב משני ההדפסות
3
שנעשו במהלך חיי הפרויקט
מבוסס על מנועי צעד השולטים בהזנה החלזונית
ונשלטים ע
"
י אלגוריתם
PID
של בקר המערכת
.
מכיל חיווי ויזואלי לתקלות ופעולות המערכת
.
מציג מימוש מלא לתכן הצירים החלזוניים
.
מכיל מנגנון הפעלה ובקרה של מסוע השינוע
.
בקרת מערכת וממשק משתמש
בקר המערכת מומש ע
"
י כרטיס ארדואינו מגה
אינטגרציה מערכתית נעשתה בממשק המשתמש
על כל מכלולי המערכת
:
•
מכלול שקילה תעשייתי בתקשורת סריאלית
•
מנועי צעד לצירים החלזוניים
•
מנוע
DC
להמחשת עקרון מסוע השינוע
•
חיישני מערכת נוספים לניתור פעולות המערכת
•
אלגוריתם בקרת
PID
למימוש הדרישות
•
ניהול מסד נתונים לניתור ושיפור ביצועי מערכת
ניסויים ותוצאות
מהניסויים שנעשו התקבלו תוצאות מספקות
לשם המחשת עקרון הפעולה
.
עבור משקל יעד
:של
= 20
התקבלה הזנה של
:
= 20.22 ± 2.01 [ ]
*
רזולוציית מכלול השקילה
:
= ±2
ספיקה מקסימלית מתקבלת
:
= 0.865 ± 0.282[ ]
*
לשם הגדרת טיב המודל בצורה נכונה
,
נדרשים ניסויים נוספים שנמנעו מאיתנו
.
'צ"
ופילר
"-
מיועדת
לחלוקת
אצוות
חומרי
גלם
בתערובות
יבשות
,
ללא
התערבות
יד
אדם
ובדיוק
גבוה
לתעשיית
. המזון
בפרויקט
זה
יצרנו
טיפוס אב
מוקטן
שמקבל
אצוות
חומר
גרגירי
בתחום
צפיפויות
מוגדר
ומבצע
חלוקה
למנות
במשקלי
יעד
שונים
ובדיוק
של
±
%
.
מימוש
המערכת
נובע
מהצורך
לייעול
ומיצוי
פס תפוקת
, הייצור
ושינוי
שיטת
העבודה
. כיום
יצרנו
ממשק
משתמש
, בעברית
המנהל
מסד
נתונים
לשיפור
תפוקת
. המערכת