














 134-135 / 568
134-135 / 568

מיכאל שטילין
,
אריאל
מורדוך
"ד: מנחים
ר ולדימיר אורליק
"ד,
ר פטריק בר
אבי -
הנדסה מכנית
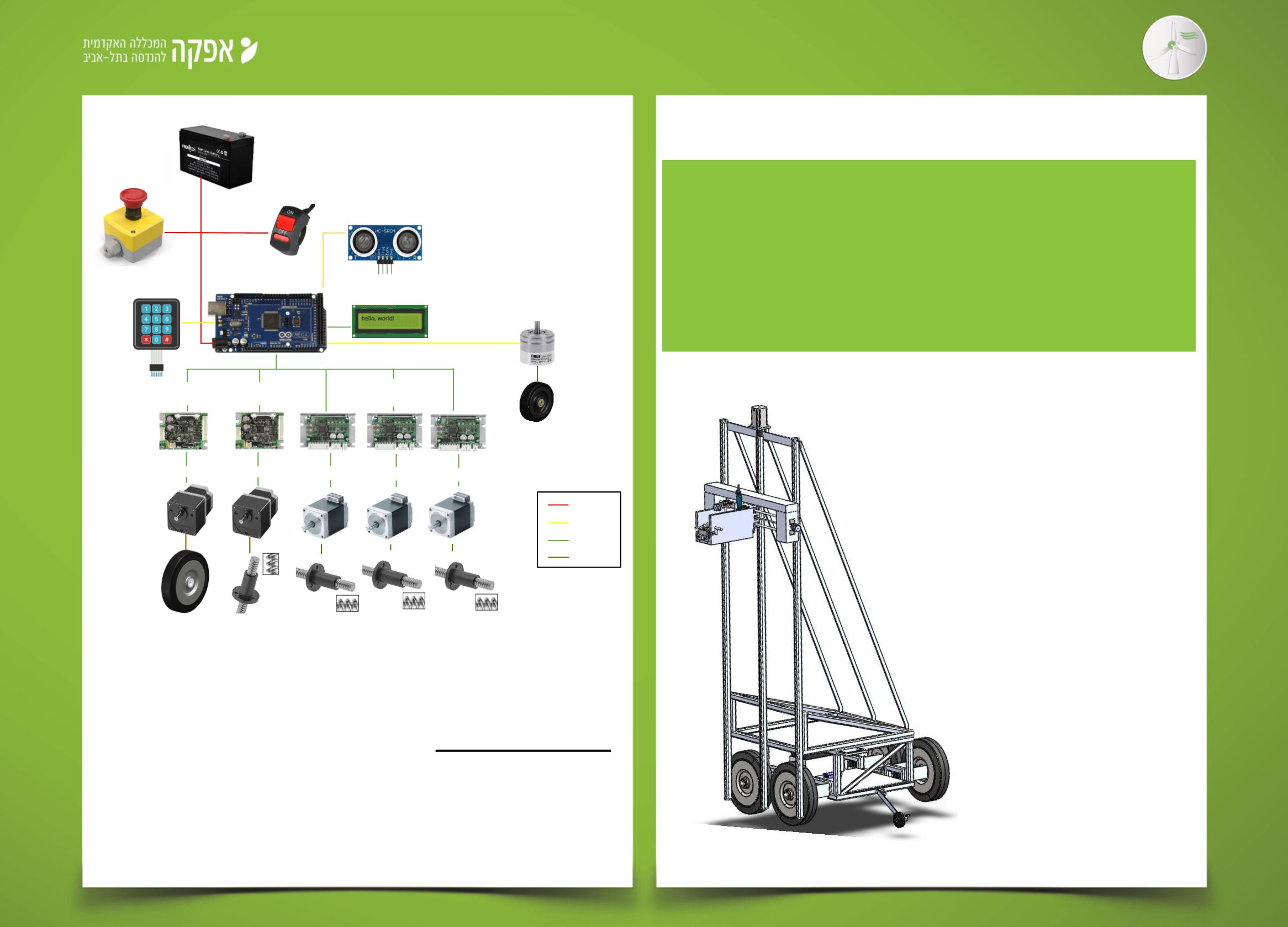
רובוט קידוח אוטומטי
Automatic Drilling Robot
הפרויקט מהווה פתרון יעיל להשדרגות בעולם הקידוח
.
באמצעות רובוט קידוח אוטונומי ניתן יהיה להמיר עבודת פועל
לעבודת מכונה באתרי בנייה גדולים
,
ובכך להאריך את שעות
עבודת הקידוח מבלי להסתמך על כוח אדם זמין
.
ולטווח הארוך
יתרום עבור קבלני בנייה בחיסכון כספי
.
עקרונות התכן
:
•
מערכת הנעה
4X4
מבוסס מנועי צעד
בהתחשב בדיוק הנדרש
•
יכולת התנועה בשלושת הצירים מתבססת
על מערכת אלקטרו
-
מכנית הפועלת
באמצעות שלושת ברגיי הנעה
•
מערכת קידוח בעלת יכולת תנועה צירית
המשלבת התאמת מס
'
כלי קידוח
אופציונליים
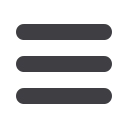
עקרונות הבקרה
:
•
מערכת בקרה ושליטה המבוססת
Arduino
•
דרייברים למנועים
•
מצבר המספק חשמל לכלל המערכת
•
אנקודר
•
חיישן מרחק
מטרת הפרויקט היא תכנון של כלל מערכות הרובוט ויצור אב
טיפוס ראשוני לבדיקת התכנות מערכת הקידוח
.
במהלך תכנון הרובוט נבדקו חלופות שונות עבור שיטת הנעת כלי הקידוח
בכלל הצירים
,
מנועי הנסיעה
,
חומרי הרובוט לייצור חלקיו
,
בקר המערכת
,
בנוסף ביצענו ניסויים עבור בדיקת התכנות התנועה
.
מצבר
V
24
100Ah
LCD
ArduinoMega2560
KEYBOARD
תוצרים של הפרויקט
:
•
ספר פרויקט
+
תיק שרטויטים
•
בניית דגם מוקטן להצגת רעיון כללי
•
סרטון המחשה
emergency button
Switch button
HC-SR04 Ultrasonic
Sensor
Y
X
Z
BUTTON
DRILL
WHEEL
CVD215BIIPOLAR
DRIVER
X
4
CMD2109PUNIPOLAR
DRIVER
PKP223D06
PKP296AESG10
PKP296AESG36
X
4
ENCODER RE36
ENCODER WHEEL
POWER
SUPPLY
INPUT
OUTPUT
MECHANIC
PKP223D06 PKP223D06