














 12-13 / 568
12-13 / 568

אמיר
, לוסקי
אבירו
הימן
: מנחה
ד״ר
חמיסה
מילאד
הנדסה מכנית
רובוט איסוף מידע ממקומות בוערים
רובוט ייעודי לשטחים אורבניים עבור כיבוי אש
דרישות עיקריות
:
.1
רובוט קל משקל ונוח לנשיאה עבור הכבאים
.
.2
בניית המערכת כך שתוכל להכיל מספר רב של אמצעים אשר יסיעו לגיבוש תמונת מצב
.
.3
בניית מערכת הנעה המסוגלת לעבור בתוך מבנה צפוף ושתוכל לטפס מדרגות
.
.4
בניית רובוט קומפקטי
,
נוח לשליטה ובקרה
,
לתפעול מהיר במצבי חירום
.
עיקרון הפעולה
:
המוצר מאפשר לכבאים בטרם כניסתם לאירוע וודאי של שריפה בדירה או בכל מבנה אורבני על
גיבוש תמונת מצב מהיר
,
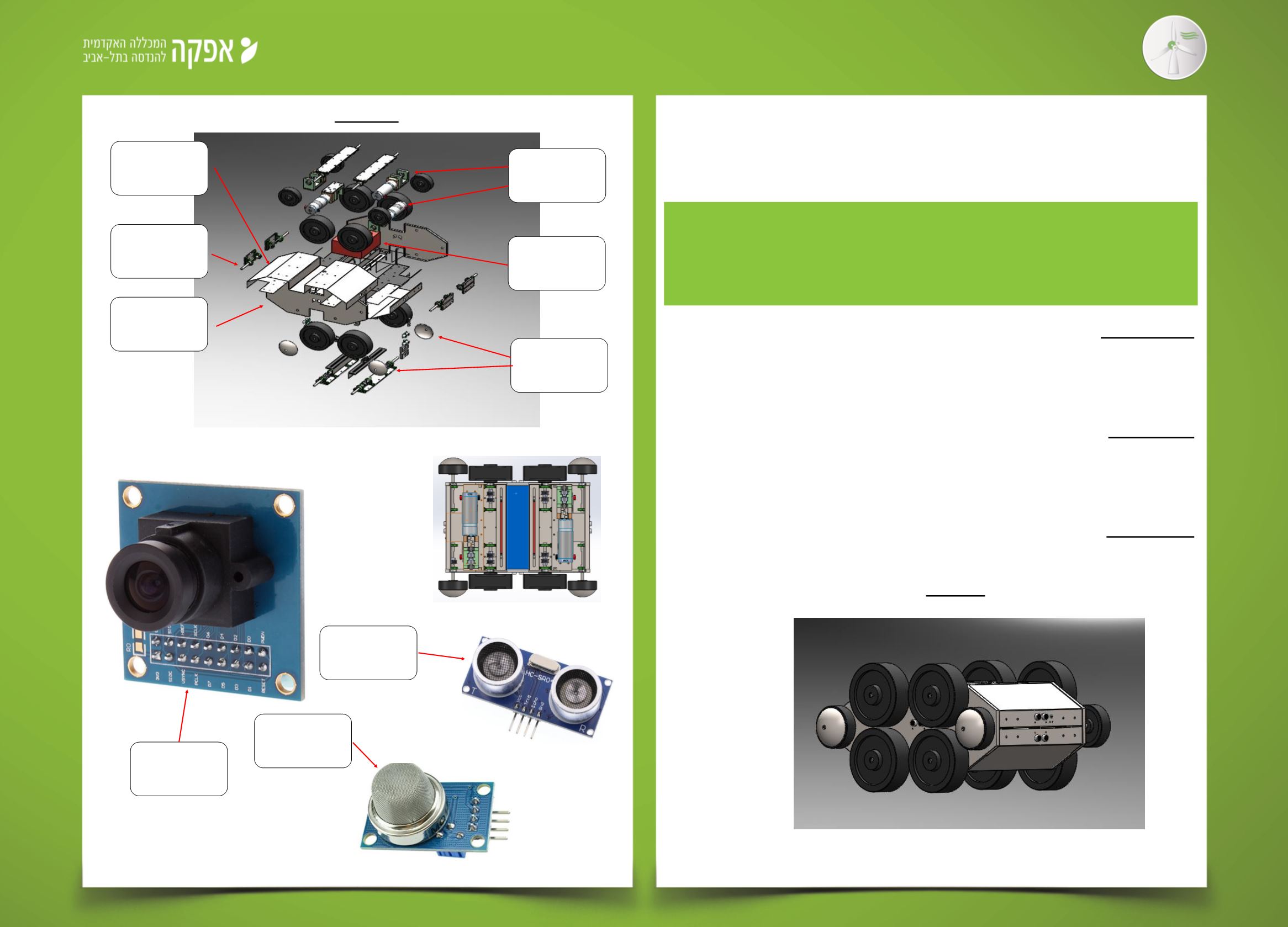
הרובוט בעל מבנה מראה ששני צדדיו זהים כך שבמקרה התהפכות
יוכל להמשיך מבלי להיתקע
,
בנוסף הרובוט מכיל אמצעים טרמיים ואמצעים ויזואליים
שמאפשרים לראות את המבנה מרחוק
,
הרובוט מאובזר גם בחיישנים לזיהוי גז
.
תוצרי הפרויקט
:
דגם אבטיפוס בגודל מלא המוכן לעבודה בעל ממשק משתמש נוח לשימוש המתאים למשתמש
הפרטי
רובוט
לאיסוף
מידע
משטחים
אורבניים
רובוט
הייחודי
מסוגו
לאיסוף
מידע
משטחים
אורבניים
עבור
כוחות
, הכיבוי
המוצר
נותן
מענה
באיסוף
מידע
בטרם
כניסת
הכוחות
למבנה
ובכך
חיי סיכון את מצמצם
. הכבאים
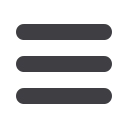
עיצוב חיצוני
שרטוט פיצוץ
מנועי
DC
סוללה
כיפות גלגל
גל ההנעה של
הגלגלים הקדמיים
שלדת צד
שלדה ראשית
חיישן
אולטראסוניק
מצלמת
IR
חיישן
CO