














 376-377 / 568
376-377 / 568

Multiple Hypothesis Real Time Tracking
Main Requirements
•
The tracking algorithm shall not exceed 100 ms.
•
The tracking algorithm shall use EKF (Extended Kalman
Filter).
•
The Hungarian algorithm shall be implemented.
Products
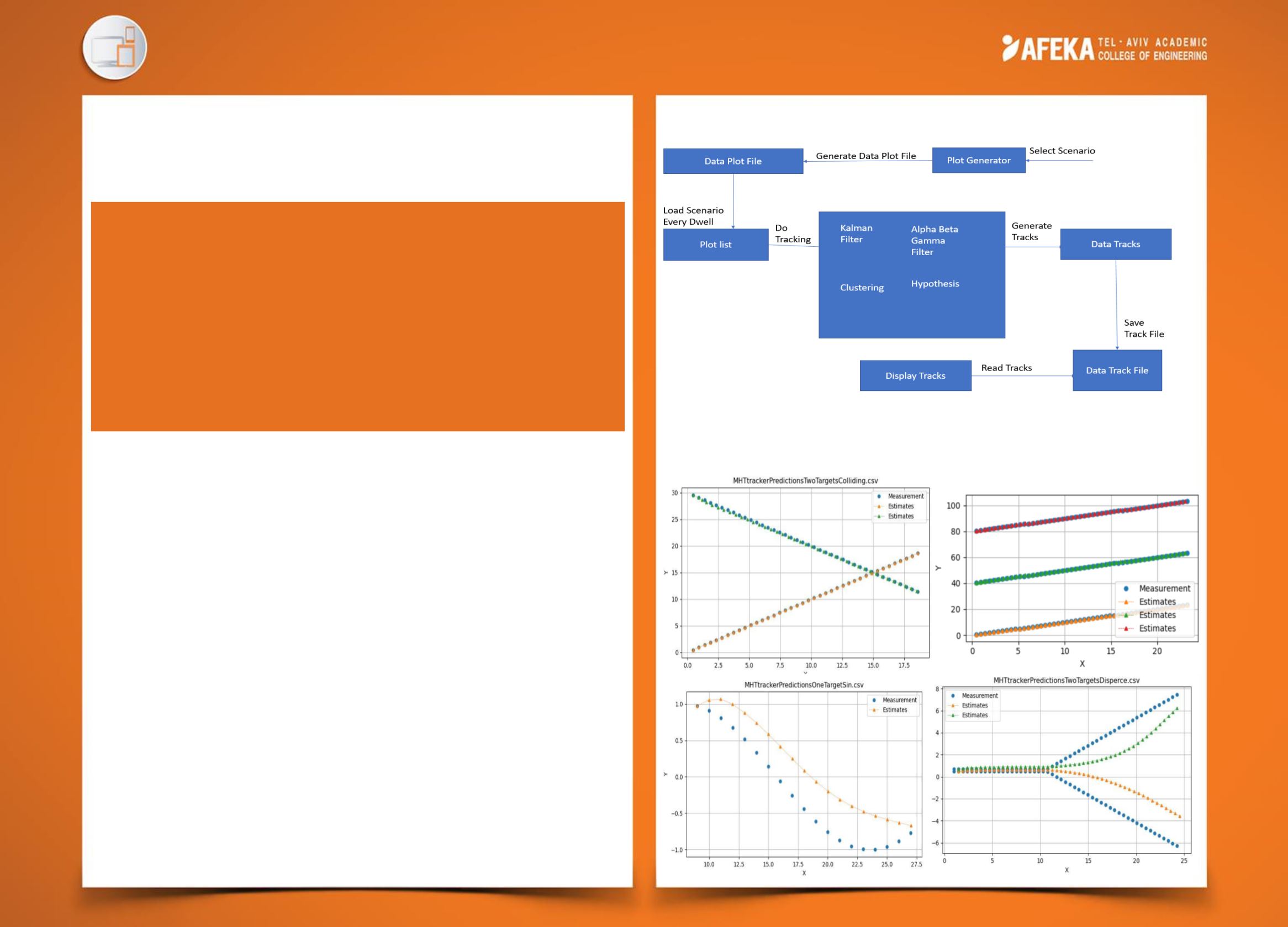
The product is a system for a real time tracking of radar
measurements using the MHT algorithm. The system
receives a txt file in csv format containing plots as the input
and the output of the system is a csv file containing the
tracks of the plots tracking.
We also provide a program which displays in a graph format
the movement of the tracks over time.
Leon Shapiro , Oded Yaakov Ades
Advisor: Dr. Israel Yaron
Software Engineering
System architecture
project results
MTH is one of the earliest successful algorithms for visual
tracking. It builds a tree of potential track hypotheses for each
candidate target, thereby providing a systematic solution to
the data association problem. The likelihood of each track is
calculated, and the most likely combination of tracks is
selected. MHT is ideally suited to exploiting higher-order
information such as long-term motion, since the entire
track hypothesis can be considered when computing the
likelihood.