














 338-339 / 568
338-339 / 568

Hand Rehabilitation System
Main requirements:
•
Portable and easy-to-operate system
•
sensitivity to paralyzed hand movements
•
clear and comfortable GUI for patient with challenging tasks that increase the range of
motion of the paralyzed hand
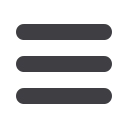
Block Diagram:
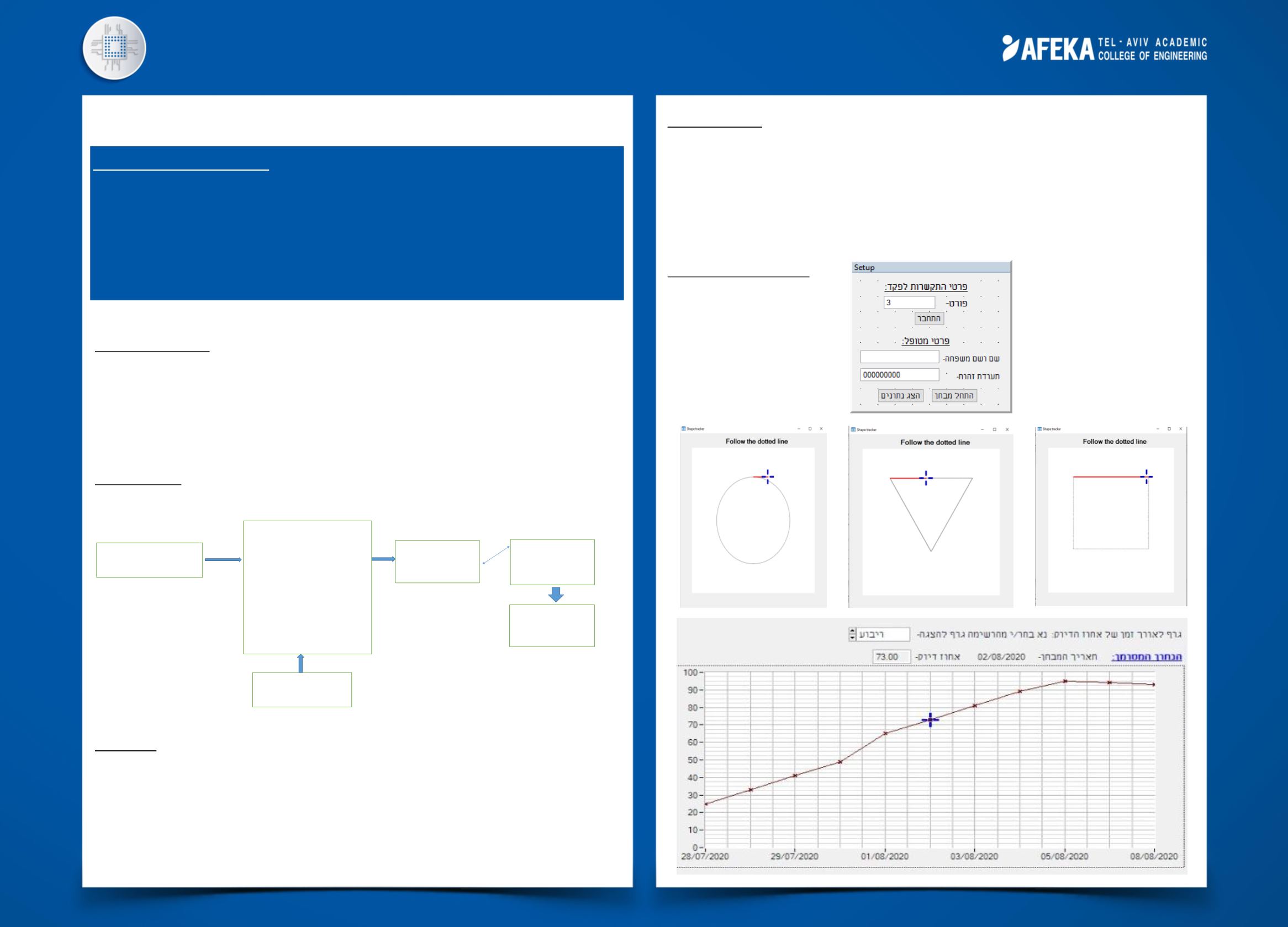
Algorithm:
Application of a CVI software algorithm that checks the accuracy of patient performance. The
patient's main task is to draw some shapes like rectangle, triangle and circle. The algorithm
will check how close the drawing is to the original shape and thus give feedback to the
patient.
Lior Ester Yosef
Advisor: Mrs. Irena Libster
Electrical Engineering
Action principle:
The information that will be sent to the software is the speed at which the user will want to
move the cursor. The conversion will be done using the map function. The function re-maps a
number from one range to another.
The accuracy is calculated by calculating the average which is the sum of the minimum
distances from the original shape divided by the total number of points, i.e. the average
minimum distance from any given shape.
The accuracy calculation will be as follows: acc = (1- (avg_d) / 15) * 100
computer user interface:
The project essence:
Develop a unique system designed to improve the mobility
of the paralyzed hand as a result of a brain stroke. The
system will examine the range of motion of the hand while
challenging games to be performed by the patient.
Joystick
Transceiver
BT
Computer
GUI
Transceiver
BT
Microcontroller
ARDUINO UNO
Battery
Two-way
wireless
connection