














 296-297 / 568
296-297 / 568

תומר יפת
,
דן ענבר
: מנחה
אהוד דיין
הנדסת חשמל
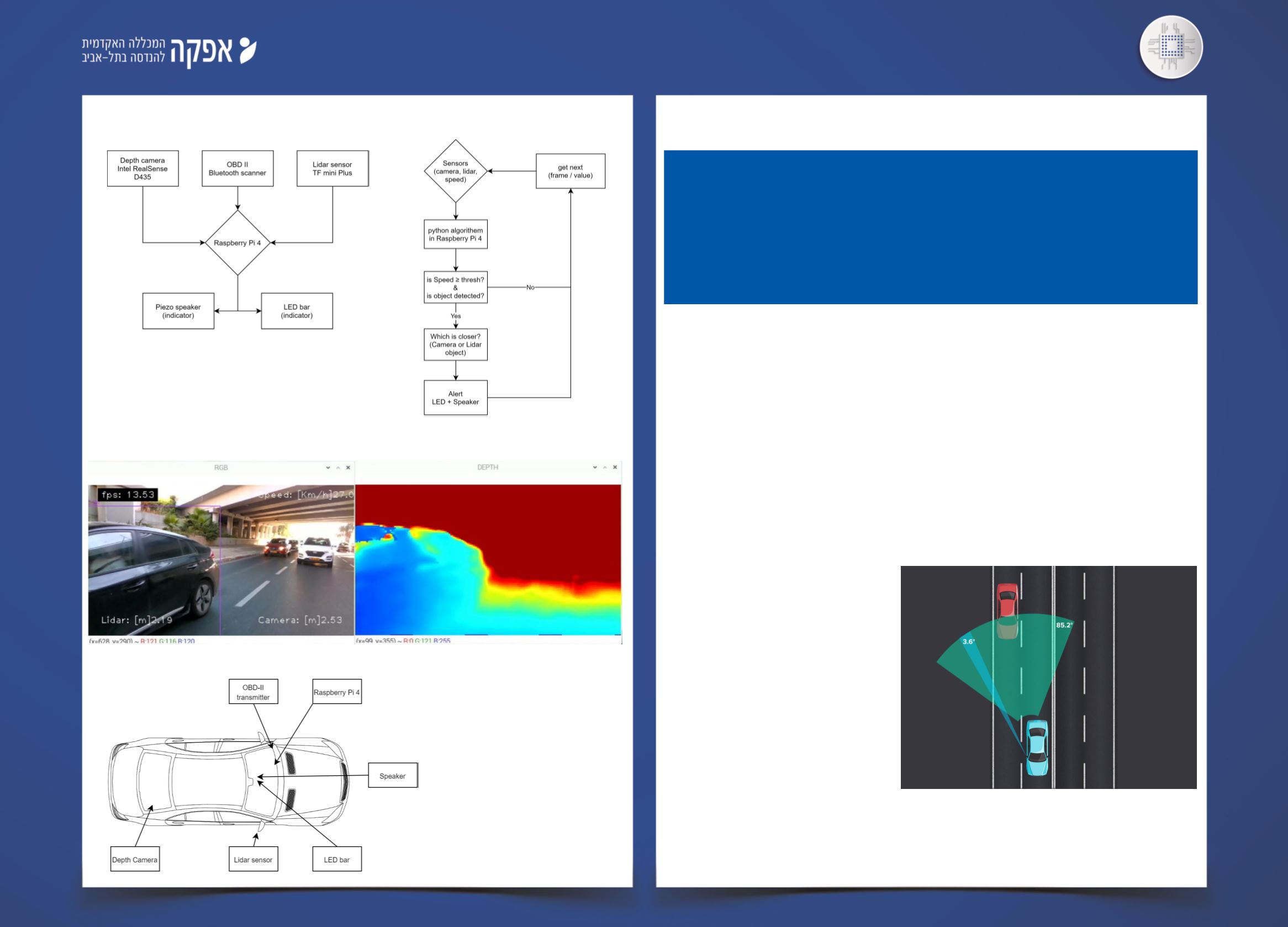
רדאר אחורי לרכב
מטרת
הפרויקט
היא
התרעה
מוקדמת
על לנהג
סכנות
בשטח
קשה אותו
ימין צד , לראות
האחורי
השטח "- הרכב של
." המת
זו מערכת
תסייע
במניעת
תאונות
הקורות
עקב
הקושי
להבחין
בסכנות
באזור
המדובר
בעת
, עקיפה
השתלבות
ומעבר
. נתיב
מטרתו
המשנית
יישום היא
המערכת
בחומרה
חלשה
יחסית
.
היכולת
להרחיבה
לאזורים
נוספים
הרכב של
הינה
יתרון
. נוסף
דרישות עיקריות
-
יכולת התרעה בזמן אמת
.
זמן קצר מספיק המאפשר תגובה לסכנה
.
-
מערכת מדויקת מספיק כך שתזהה את הסכנות בכביש ושלא תתריע לשווא
.
-
תפקוד המערכת בתנאי תאורה שונים ועמידות
למזג האוויר
.
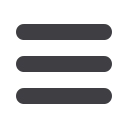
המערכת
הפתרון המוצע על ידינו הוא שילוב של חיישן מרחק
Lidar
ומצלמת עומק
,
הנשלטים על ידי מחשב
לוח -
Raspberry Pi 4
בסביבת עבודה של
Python
,
תוך שימוש בספריות כגון
OpenCV
- וה
SDK
של מצלמת
. העומק
את תזרים ה
RGB
ננתח באמצעות אלגוריתם לזיהוי עצמים שאימנו על כלי רכב
-
YoloV3
.
כך נזהה עצמים בקרבת המכונית ואת מרחקם נחשב באמצעות ניתוח המידע
מתזרים
מצלמת
. העומק
חיישן ה
Lidar
מודד מרחק מכל עצם בקרבת המכונית לכיסוי שטח הזיהוי של המצלמה
.
המערכת תתריע לנהג על כל אובייקט המתקרב לאזור המדובר של המכונית
.
בכדי למנוע התראות שווא והתרעות תכופות במצבים אשר אינם מסכנים את הנהג
,
נקבע מהירות סף
של הרכב ממנה המערכת תתחיל להתריע
.
את מהירות הרכב נמדוד באמצעות חיבור למחשב הרכב
בעזרת סורק
OBD
.
כל הנתונים יעובדו בזמן אמת על מנת לתת התרעה נכונה ומהירה לנהג
.
תרשים זרימה
–
פעולה
דיאגרמת בלוקים
–
מבנה
: למטה
המידע המתקבל מן המצלמה וניתוחו בקוד
.
, מימין
מידע העומק ממופה לצבעים ומשמאל תמונת ה
RGB
לאחר ניתוחה
.
מיקום חלקי המערכת השונים בכלי הרכב
:
Depth camera
Lidar sensor