














 152-153 / 568
152-153 / 568

אייל רפופורט
: מנחה
מר עמוס ארבל
הנדסה מכנית
בלימת משגר כטב
"
ם בעזרת משטחי בלימה
אווירודינמיים
מודל המנגנון
דרישות המנגנון
:
•
פעולת
המנגון
מתבצעת
בצורה
אוטומטית
ללא
מערכת
בקרה
חשמלית
וללא
תלות
ברכיבים
. חשמליים
•
בלימת
גוף
יחידת
השיגור
צריכה
להתבצע
בצורה
מדויקת
במרחק
קצר
מנקודת
השיגור
לצורך
פריסת
רשת
נחיתה
.
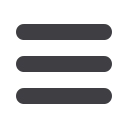
תוצאות מאנליזות
Matlab
תוצאות אנליזות
Matlab
אלו מספקות מידע הנוגע למספר פרמטרים רלוונטיים
:
•
היטל המרחק על פני הקרקע עד לעצירה סופית של גוף יחידת השיגור
.
•
זמן בלימתו של גוף יחידת השיגור עד לעצירה סופית
.
•
תאוצת המערכת
(
גוף יחידת השיגור והכטב
) ם"
ברגע ההפרדה ותאוצת גוף יחידת השיגור עד
. הנחיתה
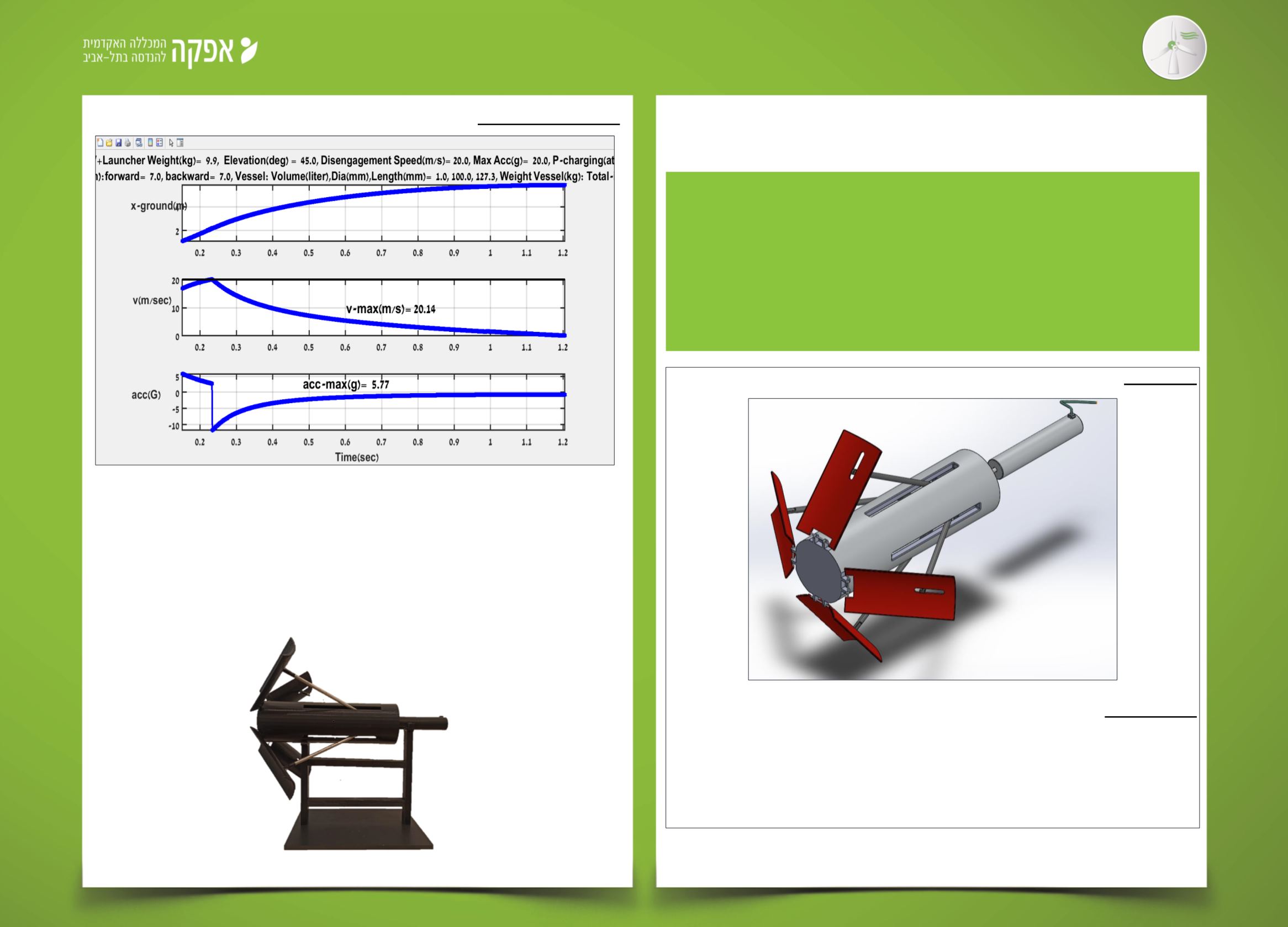
אופן
פעולתו
פרויקט של
זה
מתבסס
על
מנגנון
את המסיט
שארית
הלחץ
הנותר
בגוף
יחידת
השיגור
עבר אל
בוכנה
פניאומטית
,
זו בוכנה
פורסת
את
משטחי
הבלימה
אשר
צורתם
מגדילה
מקדם את
הגרר
משמעותית
עד
לבלימת
גוף
יחידית
השיגור
במרחק
-כשל
6
מטרים
מנקודת
השיגור
ובזמן
של
-כ
1.2
. שניות
פרויקט
זה
משמש
כבלם
אוויר
אוטומטי
אשר
מטרתו
הפרדת
גוף
יחידת
השיגור
בלתי טיס כלי (ם" הכטב מן
.) מאויש
הפרדה
זו
מתבצעת
בצורה
אוטומטית
כתלות
בכמות
הלחץ
הקיימת
בגוף
יחידת
השיגור
ברגע
הגעת
ם" הכטב
למהירות
. שיוט
זה מנגנון
מכני הינו
לחלוטין
ללא
שימוש
ברכיבים
חשמליים
בקרה או
. חשמלית